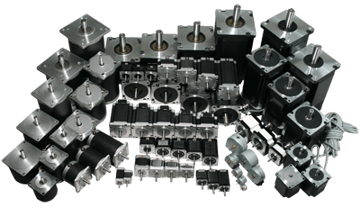
Stepper motors closed loop that are traditional rotary motors couple to mechanical rotary-to-linear motion devices (often in the form of a threaded shaft that mates with traversing nut or carriage) to produce linear motion. In this actuator setup, the motor output shaft usually couples to the screw to turn it … and advance the nut (or carriage) and attached load. These are usually small designs that go into consumer products or small-stroke applications in industrial machines.
Summary of linear stepper motors Online
Engineers most commonly use these linear actuators in larger installations; on axes that move heavier loads; and in high-end medical or material-handling applications such as pick-and-place machinery that require extremely high precision. Like rotary equivalents, linear stepper motors either use a variable reluctance (just described) or a hybrid mode of operation. A hybrid linear-stepper platen is like that of a variable-reluctance linear stepper. In contrast, the forcer has multiple permanent magnets, magnetic U-shaped cores (with coils around them) and a steel yoke.
Summary of rotary-stepper-driven axes
When engineers use rotary-stepper-driven axes instead of linear stepper motors, they face a different set of design considerations. For starters, the engineer must pick the leadscrew’s lead and pitch. Lead defines the distance a screw thread advances in one revolution. Pitch is the distance between adjacent threads. A small lead with more threads per inch outputs higher force and resolution; large leads (or fewer threads) output lower force but higher speed.
https://blogcircle.jp/blog/32349